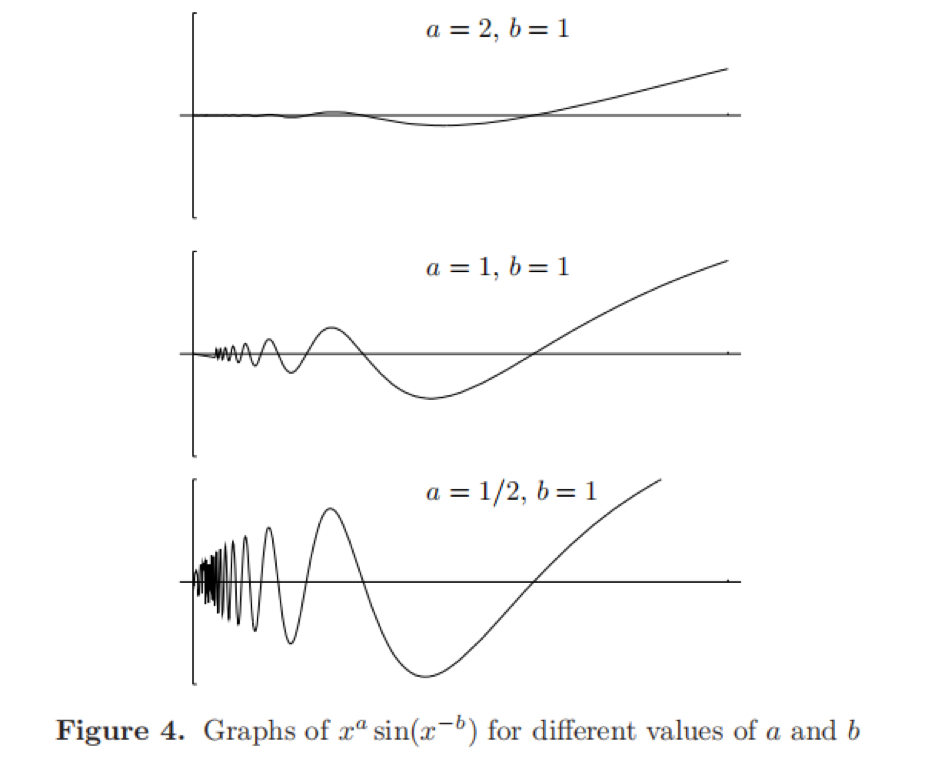
解析学における有界変動の函数(ゆうかいへんどうのかんすう、英: function of bounded variation)あるいは有界変動函数(BV-function; BV函数)は、その変動が有界、すなわち全変動が有限値となるような実数値函数を言う。この性質は函数のグラフが以下に述べる意味において素性のよい (well behaved) ものであることを述べるものである。話を一変数の連続函数に限定すれば、有界変動であることはその連続函数のグラフ上を奔る動点の(x-軸方向への寄与分は無視して)y-軸方向への移動距離が有限であることを意味する。多変数の連続函数の場合にもこれは同様の意味を持つのであるが、考えるべき動点の辿る連続な路としては、与えられた函数のグラフ全体(今の場合これは超曲面になる)を取ることができないという事実があるので、函数のグラフと固定された x-軸および y-軸に平行な任意の超平面との交叉を取る必要がある。
- 有界変動の函数があれば、その函数に関するリーマン–スティルチェス積分が任意の連続函数に対して定められる。
- 別な特徴付けとして、有界閉区間(コンパクト区間)上の有界変動函数は二つの有界単調増大函数の差として表される。
多変数の場合、開集合上定義された函数が有界変動となるのは、その函数の弱微分(超函数の意味での微分)がベクトル値の有限ラドン測度となるときである。
有界変動函数の最も重要な側面の一つは、その全体が殆ど至る所一階微分の存在する不連続函数の成す函数環に一致することである。この事実により、数学・物理学・工学などにおける汎函数・常および偏微分方程式を含む非線型問題の弱解を定めるのに有界変動函数を用いることが可能で、しばしば用いられる。超函数の乗法問題やより一般の超函数に対する一般非線型演算の定義問題を考えるとき、有界変動函数の環は、乗法の結果を保つ任意の超函数空間に埋め込まれるべき最小の函数環である。
歴史
Boris Golubov によれば、一変数の有界変動函数を初めて導入したのはカミーユ・ジョルダンで、フーリエ級数の収束を扱った論文 (Jordan 1881) においてである。多変数函数に対する有界変動の概念の一般化に成功した最初の段階はレオニダ・トネリによるもの で、トネリは1926年に、変分法における問題の解を求めるための、自身の直接法を多変数に拡張するために、連続有界変動函数のクラスを導入した(Cesari 1986, pp. 47–48)。Cesari (1936) はトネリの定義における連続性の仮定をより制限の緩い「可積分性」の要求に置き換えて、全く一般の多変数有界変動函数のクラスを初めて得ている。ジョルダンがかつてしたように、チェザリはこれをフーリエ級数の収束問題の解法に用いたが、それは「二変数」の函数に対するものであった。チェザリ以降、さまざまな数学者たちが、有界変動函数を多変数のフーリエ級数、幾何学的測度論、変分法および数理物理学に応用した。レナート・カッチョポリとエンニオ・デ・ジョルジは、集合の滑らかでない境界の測度を定義するために有界変動函数を用いた(詳細は カチョッポリ集合の項を参照)。Oleinik (1957) は非線型偏微分方程式に対する弱解として有界変動函数の空間 BV から取った函数を見る観点を導入し、論文 (Oleinik 1959) で一階偏微分方程式の有界変動な弱解の構成に成功した。Conway & Smoller (1966) は一変数の一階非線型双曲型偏微分方程式の研究に有界変動函数を応用し、そのような方程式の(初期値が有界変動のクラスに属するという仮定のもとでの)コーシー問題の解が有界変動函数であることを示した。アイザック・イサコヴィッチ・フォルペルトは有界変動函数に対するより広汎な解析学を展開した。論文 (Vol'pert 1967) において有界変動函数に対する連鎖律が証明され、弟子との共著 (Hudjaev & Vol'pert 1985) において有界変動函数の性質とその応用について広く調べられている。この連鎖律の公式は後に Ambrosio & Dal Maso (1990) によって拡張されている。
定義
一変数の場合
- 定義 1.1. (全変動)
- 実数直線内の区間 [a, b] ⊂ ℝ 上で定義された実数値(あるいはより一般に複素数値)函数 f の全変動 V b
a (f) (= V[a, b](f) = V(f, [a,b])) は で定義される量である。ここに上限は与えられた区間の分割の全体 𝒫 = {P = {x0, …, xnP} : P は区間 [a, b] の分割} に亙ってとるものとする。
f が微分可能かつその導函数がリーマン可積分ならば、f の全変動はグラフの弧長の垂直成分 に等しい。
- 定義 1.2. (有界変動函数)
- 実数直線上で定義された実数値函数 f が、与えられた区間 [a, b] ⊂ ℝ 上で有界変動であるとは、その区間における f の全変動が有限となるときに言う。記号で書けば、
実函数 ƒ が [a, b] 上で有界変動となるための必要十分条件が、[a, b] 上で広義単調増大な二つの函数の差 ƒ = ƒ1 − ƒ2 に書けることであることが示せる。このような差への分解を(函数の)ジョルダン分解 と呼び、測度のジョルダン分解と関連する。
スティルチェス積分を考えることにより、閉区間 [a, b] 上の任意の有界変動函数は連続函数の空間 C[a, b] 上の有界線型汎函数を定める。その特別の場合として、リースの表現定理は任意の有界線型汎函数がこの方法で一意に得られることを述べる。正規化された正値函数あるいは確率測度は広義単調増大下半連続な正値函数に対応する。このような観点はスペクトル論において、特に常微分方程式への応用において重要である。
多変数の場合
多変数の函数が有界変動であるとは、その超函数微分が有限ラドン測度となるときに言う。より精確に:
- 定義 2.1. (多変数の有界変動函数)
- Ω を ℝn の開集合とする。可積分函数 u ∈ L1(Ω) が有界変動、すなわち u ∈ BV(Ω) であるとは、有限ベクトル値ラドン測度 Du ∈ ℳ(Ω, Rn) が存在して、以下の等式 を満たすときに言う。
つまり、u は積分により Ω に含まれるコンパクト台を持つ連続的微分可能ベクトル値函数の空間 C 1
c (Ω, Rn) 上の線型汎函数を定めるが、したがってベクトル測度 Du はシュヴァルツ超函数としての u の微分あるいは弱勾配である。
全変動による同値な定義もできる:
- 定義 2.2. (多変数の全変動)
- 可積分函数 u ∈ L1(Ω) の Ω における全変動 は で定義される。ここに、‖ • ‖∞ は Ω 上の本質的上限ノルムである。
- カチョッポリ集合の理論などでは、これが u の弱勾配 Du の全変動であることを強調するために ∫Ω‖ Du ‖ := V(u, Ω) のように書くこともある。同じ記号は u が C1-級(つまり連続かつ微分可能であって、導函数も連続)のときにも用いられ、この場合には実際に u の(真の)勾配の絶対値の積分になっている。
- このとき、有界変動函数全体の成す空間は と定義することができる。
この二つの定義が同値であることは以下のようにしてわかる。V(u, Ω) < ∞ ならば したがって φ ↦ ∫Ωu(x)divφ(x)dx は空間 C 1
c (Ω, Rn) 上の連続線型汎函数を定める。C 1
c (Ω, Rn ⊂ C0(Ω, Rn) は線型部分空間であるから、ハーン–バナッハの定理により、先ほどの連続線型汎函数は C0(Ω, Rn) の全体まで連続かつ線型に延長できる。従って、この連続線型汎函数はリース–マルコフの定理によりラドン測度を定義する。
局所有界変動
先の定義 1.2, 2.1, 2.2 において、大域可積分函数を考える代わりに局所可積分函数の空間 L 1
loc (Ω) を考えれば局所有界変動函数の空間が定まる。具体的に、定義 2.2 に対してこのような考えを適用するとき、Ω の(有限次元線型空間の標準位相に関する)前コンパクト開部分集合 U ∈ 𝒪c(Ω) における局所変動 (local variation) は として定義され、対応する局所有界変動函数のクラスが として定まる。
記法についての注意
局所および大域の有界変動函数の空間を表す記号法について、基本的には二つの異なる規約が存在し、困ったことにそれら二つはよく似ている。一つは本項でも用いた記法であり、例えば Giusti (1984) (partially), Hudjaev & Vol'pert (1985) (partially), Giaquinta, Modica & Souček (1998) で用いられているものだが、
- BV(Ω) は大域有界変動函数の空間を表し
- BVloc(Ω) が局所有界変動函数の空間を表す
というものである。いま一つは、Vol'pert (1967) および Maz'ya (1985) (partially) で用いられたもので、
- BV(Ω) で大域有界変動函数の空間を表し、
- BV(Ω) が局所有界変動函数の空間を表す
というものである。
一般化
重み付き有界変動函数
全変動の概念を一般化して、重み付き全変動を考えることができる。より精確に、任意の単調増大函数 φ: [0, ∞) → [0, ∞) で φ(0) = φ(0 ) = limx→ 0 φ(x) = 0 を満たすものを重み函数とし、f: [0, T] → X は実数直線内の区間 [0, T] ⊂ ℝ 上で定義されノルム空間 X に値を取る函数とする。このとき、f の [0, T] 上の φ-変動は で定義される。ここで、ふつうは、上限 sup は区間 [0, T] の有限分割(すなわち 0 = t0 < t1 < ⋯ < tk = T を満たす実数 ti からなる有限集合)全てを亙ってとる。
もともとの全変動は重み函数 φ が恒等写像で与えられる特別な種類の φ-変動として考えることができる。そこで可積分函数 f が重み φ に関する重み付き有界変動函数あるいは重み φ-付き有界変動函数、φ-BV函数とは、その φ-変動が有限となることと定める。
空間 BVφ([0, T]; X) はノルム に関して位相線型空間を成す。ただし、‖ f ‖∞ は f の上限ノルムである。重み付き有界変動函数を導入し完全に一般に研究したのは Musielak & Orlicz (1959) である(Laurence Chisholm Young は正整数 p に対する φ(x) = xp の場合に先駆的な研究を残した)。
特殊有界変動函数
特殊有界変動函数(SBV函数)は自由不連続性変分問題を扱った論文 Ambrosio & De Giorgi (1988) で導入された。与えられた開集合 Ω ⊂ ℝn に対して特殊有界変動函数の空間 SBV(Ω) は BV(Ω) の真の部分空間になる。というのも、その空間に属する各函数の弱勾配は、以下の定義に見るように、 n-次元の台と (n − 1)-次元の台を持つ測度の(中間次元の項を持たない)和に表されるからである。
- 定義
- 局所可積分函数 u が SBV(Ω) に属するとは、以下の二条件がともに満足されることを言う:
- 二つのボレル可測函数 f, g: Ω → ℝn が存在して を満たす。
- Ω に含まれるコンパクト台を持つ任意の連続的微分可能ベクトル値函数 φ, すなわち任意の φ ∈ C 1
c (Ω, Rn) に対して、等式 が成り立つ。
- ここで Hα は α-次元ハウスドルフ測度である。
特殊有界変動函数の性質の詳細は参考文献節に挙げられた文献を参照、特に論文 (De Giorgi 1992) には有用な参考文献が挙げられている。
有界変動数列
バナハ空間の例として Dunford & Schwartz (1958, Chapter IV) は有界変動函数の空間に加えて有界変動数列の空間を考える。実または複素数列 x = (xi) の全変動は で定義される。全変動が有限であるような数列全体の成す空間 bv は で定められるノルムに関してバナッハ空間を成す。
全変動それ自体も bv の適当な部分空間上のノルムを定める。すなわち、limn→∞ xn = 0 なる数列 x = (xn) 全体の成す空間 bv0 上のノルムが で与えられる。このノルムに関して bv0 もバナッハ空間となる。
有界変動測度
可測空間 (X, Σ) 上の符号付き測度(あるいは複素測度)μ が有界変動であるとは、その全変動 ‖ μ ‖ = |μ|(X) が有限となるときに言う(詳細は Halmos (1950, p. 123), Kolmogorov & Fomin (1969, p. 346) を参照)。
関連項目
注
参考文献
外部リンク
理論
- Golubov, Boris I.; Vitushkin, Anatolii G. (2001), “Variation of a function”, in Hazewinkel, Michiel, Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4, https://www.encyclopediaofmath.org/index.php?title=Variation_of_a_function
- BV function - PlanetMath.org(英語) .
- Rowland, Todd and Weisstein, Eric W. "Bounded Variation". mathworld.wolfram.com (英語).
- Function of bounded variation at Encyclopedia of Mathematics
その他
- Luigi Ambrosio home page at the Scuola Normale Superiore, Pisa. Academic home page (with preprints and publications) of one of the contributors to the theory and applications of BV functions.
- Research Group in Calculus of Variations and Geometric Measure Theory, Scuola Normale Superiore, Pisa.
この記事は、クリエイティブ・コモンズ・ライセンス 表示-継承 3.0 非移植のもと提供されているオンライン数学辞典『PlanetMath』の項目BV functionの本文を含む